

-
[行业新闻] 捷象灵越与极智嘉达成深度合作,共拓全球托盘......
2026-06-17
-
[行业新闻] 三一机器人无人叉车重磅亮相2026工程机械......
2026-06-17
-
[行业新闻] 上海ProPak开展|翼菲BAT并联机器人......
2026-06-17
-
[行业新闻] 井松智能完成董事会换届,董事长姚志坚兼任总......
2026-05-26
-
[行业新闻] AGV项目怎么评估可行性?5大维度+20个......
2026-05-22
-
[行业新闻] 具身智能人形机器人NAVIAI 亮相Log......
2026-05-09



机器人能跑能跳,能上下楼梯,端茶倒水的秘密武器是什么? 答案是伺服驱动器。

伺服驱动器是实现机器人运动能力的核心部件,在机器人系统中的功能等同于人体的关节组织,因此又被称为“关节驱动器”;此外,它还要承担一部分感知能力,感知外界的力之后再给外界一个力反馈,从而实现柔性控制,确保机器人在外界不断变化的环境中安全、顺畅地工作。
服务型机器人伺服驱动器技术门槛高,由于安装空间和应用工况的限制,不仅需要体积小、重量轻,还得具备大扭矩、高精度的特点,往往占到机器人总成本50%以上。
随着服务机器人市场需求的快速增长,作为典型“高精尖”零部件的伺服驱动器正在受到广泛关注。国际标准化组织齿轮技术委员会(ISO/TC60)委员、教育部长江学者特聘教授石照耀博士和优必选人形机器人创新中心专家丁宏钰为此撰写了《双足仿人机器人驱动器——演进、现状与前景》一文,充分探讨伺服驱动器的发展历程,分析了双足仿人机器人关节的运动特点并提出了其核心技术指标,对刚性驱动器、弹性驱动器和准直驱驱动器三种主流技术路线的发展进行了论述和综合比较,清晰地论述了下一阶段驱动器原理的新研究方向和现有驱动器技术的发展趋势。
让我们通过此文来了解机器人的关节——“伺服驱动器”。
双足仿人机器人驱动器——
演进、现状与前景
双足仿人机器人被誉为“制造业皇冠上的明珠”,机器人关节驱动器(也称为机器人一体化关节)是双足仿人机器人关键部件,按动力来源可以分为液压、气动、电机驱动、记忆金属、生物类(心肌细胞)等,这里只讨论电机驱动的驱动器。本文中驱动器由电机、减速器、编码器、控制板和控制软件等组成。
双足仿人机器人在很多应用场合可以协助或代替人类工作,如家庭助手、灾难救援、防爆和反恐等。期望其接近甚至达到人类的运动性能,但无论是本田的ASIMO,还是波士顿动力ATLAS,亦或是意大利技术研究院的Walk-Man都没有全面达到人或动物的运动性能。双足仿人机器人关节运特点和人类类似,如运动速度快,机动性能好,步幅和步频变化,能量新陈代谢变化,离散着地点,高速碰撞等。这些运动特点要求驱动器具有高功率密度、高响应性、高能量利用效率和耐冲击性等特性。
本文对刚性驱动器、弹性驱动器、准直驱驱动器的国内外研究现状进行详细论述,综合比较3种驱动器技术,分析当前遇到的问题,提出了下一步的发展趋势。
一、驱动器的演进
1971年,早稻田大学加藤一郎教授成功研制出世界上第1台三维双足机器人WAP-3,并实现静步行走,揭开了双足仿人机器人研制的序幕。
双足仿人机器人相对于传统轮式和履带式机器人有许多突出的特点,如双足仿人机器人具有地面适应性好,能耗小,工作空间大,双足或多足行走等,这些特点对机器人的机械结构及驱动器有很高的要求。
双足仿人机器人驱动器的研究已有30多年的历史,其类型和历史如图1所示,其中有3个关键事件:
1)1983年,早稻田大学研究的WL-10R机器人使用刚性驱动器TSA(traditional stiffness actuator)。自此双足仿人机器人开始广泛应用刚性驱动器为关节动力源。
2)1995年,麻省理工学院的Pratt等人提出了弹性驱动器SEA(series elastic actuator)的概念,拉开了弹性驱动器研究的序幕。美国宇航局的机器人Valkyrie和意大利技术研究院的机器人Walk-Man都使用了弹性驱动器。
3)2016年,Wensing等提出了准直驱驱动器PA(proprioceptiveactuator)的概念,并将其应用于四足机器人Cheetah和双足机器人Hermes,准直驱驱动器成为最近几年研究的热点。
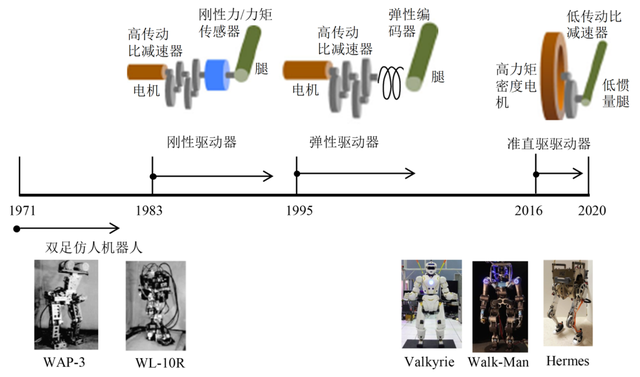
图1 驱动器类型和历史
过去30多年驱动器技术的发展,主要表现在以下几方面:
1)驱动器和整机关系方面,经历了驱动器独立设计到和整机融合的发展。
2)整体设计方面,经历了刚性驱动器到弹性驱动器和准直驱驱动器的发展。
3)减速器方面,经历了大传动比减速器到小传动减速器的演变。
4)控制方面,经历了从位置控制到力位混合控制和阻抗控制的演变。
二、驱动器的研发现状
2.1 刚性驱动器
刚性驱动器主要由电机、高传动比减速器、编码器、力矩传感器和控制板等组成,力矩传感器是可选择项。
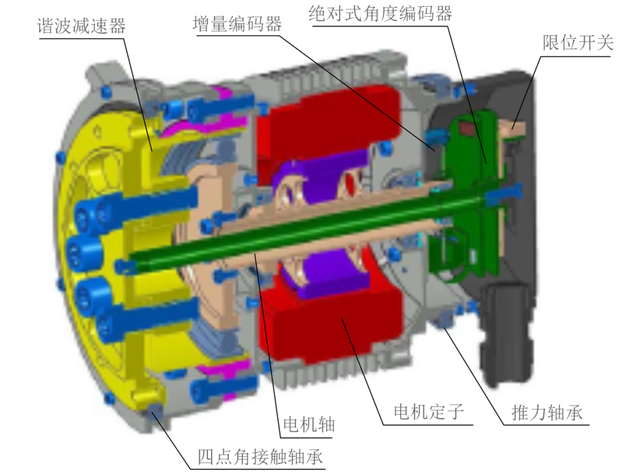
图2 刚性驱动器
整体设计方面,Sebastian 等为机器人LOLA设计了驱动器,如图2所示,包括无刷电机、谐波减速器、绝对编码器和增量编码器等。Iribe等为SDR 机器人开发了驱动器,此驱动器包括内转子电机和精密减速器,它的特点是具有高反驱动能力。为了方便设计布局和拆装,Park等提出了驱动器模块化设计概念。表1所示是目前主要刚性驱动器配置比较,除韩国Robotis的Dynamixel Pro Series的驱动器采用摆线针轮减速器外,其他均采用谐波减速器,为了节省轴向尺寸空间刹车和力矩传感器不是必选的,所有的设计都使用了绝对式编码器,因为通常机器人本体会装有陀螺仪IMU(inertial measurement unit),驱动器很少另外再装设IMU。


2026“全国移动机器人行业活动”合作商招募中
报名热线:400-0756-518、13512726426 同微信
活动时间:2025-08-01至08-31
-
 易行新启 智见未来!易行机器人华东工厂开业暨新品发布会即将启幕
易行新启 智见未来!易行机器人华东工厂开业暨新品发布会即将启幕 -
 展会直击|深耕海外智造,拓局东南亚!AiTEN亮相泰国ME2026
展会直击|深耕海外智造,拓局东南亚!AiTEN亮相泰国ME2026 -
 胜启新篇|优宝特落子深圳,构筑全国发展新格局
胜启新篇|优宝特落子深圳,构筑全国发展新格局 -
 仙工智能亮相 2026 张江 EAI,入选人形机器人产业创新联盟
仙工智能亮相 2026 张江 EAI,入选人形机器人产业创新联盟 -
 迎战618 | 极速跃迁机器人柔性分拣,让物流提效“轻装上阵”
迎战618 | 极速跃迁机器人柔性分拣,让物流提效“轻装上阵” -
 工信部、国资委双部门发力,优必选 Walker S2 入选深圳 “机器人 +”应用示范案例
工信部、国资委双部门发力,优必选 Walker S2 入选深圳 “机器人 +”应用示范案例 -
 智造现场 | 斯坦德机器人亮相 NEPCON Thailand 2026
智造现场 | 斯坦德机器人亮相 NEPCON Thailand 2026 -
 华晟智能冲刺北交所:深耕橡胶轮胎智能物流,客户矩阵含金量高
华晟智能冲刺北交所:深耕橡胶轮胎智能物流,客户矩阵含金量高




Copyright © 2018-2025, 服务热线 400-0756-518
www.zhineng518.com,All rights reserved
版权所有 © 518智能装备在线 未经许可 严禁复制 【冀ICP备19027659号-2】 【公安备13050002001911】
运营商:河北大为信息科技有限公司