针对室外大场景的移动机器人应用,绕不开的定位系统就是GNSS全球导航卫星系统了,在空旷园区、室外大广场、空旷农业基地和大型电站室外等场景下应用的移动机器人主要依赖的定位方式就是通过GNSS全球导航卫星系统实现的。
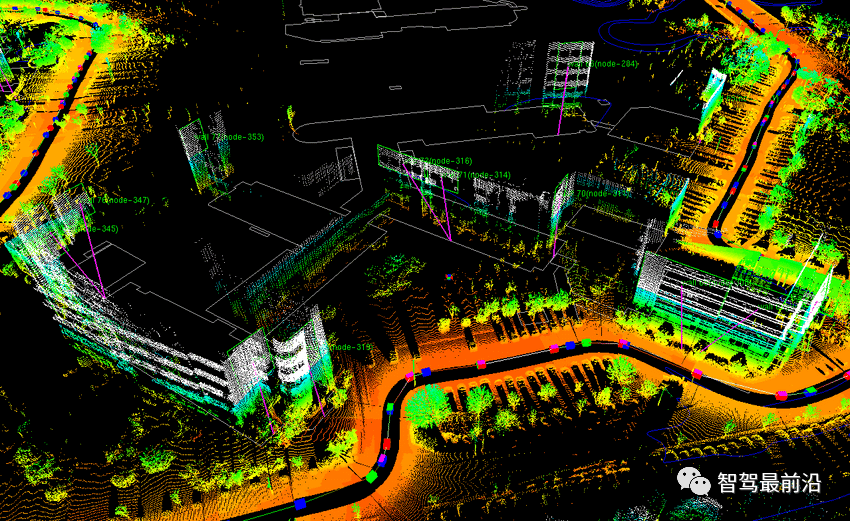
图11 3D激光定位
视觉定位技术发展现状
定位技术往往伴随着传感器技术的进步而发展。比如,2D激光雷达使定位技术的鲁棒性第一次达到商用级别,3D雷达则进一步将其推广到更广阔的应用场景,比如自动驾驶。在过去数十年内,视觉传感器发展迅速,目前基于视觉定位的技术也达到商用水平,广泛地应用在VR、AR和基于视觉定位的移动机器人导航上。
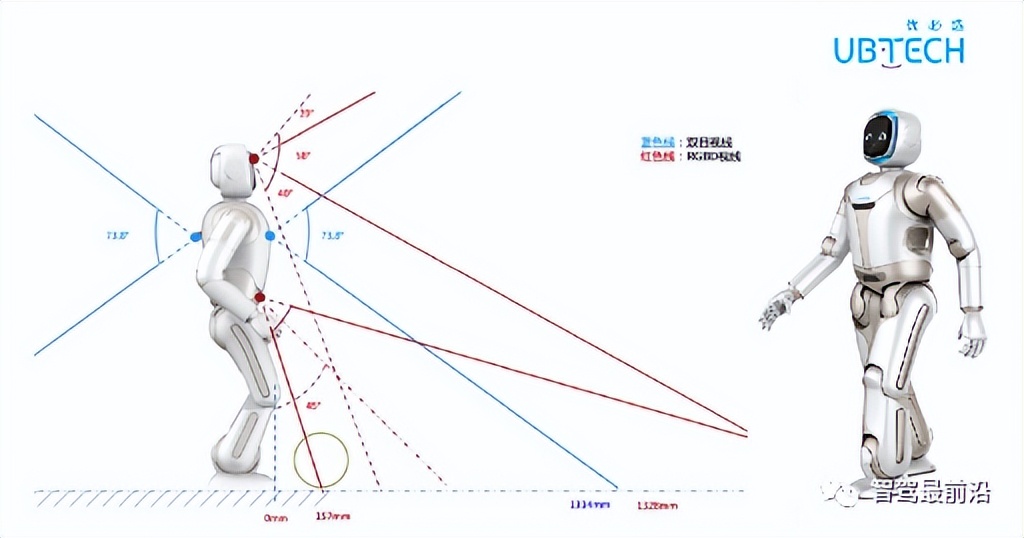
图12 视觉SLAM运用在优必选服务机器人walker上
视觉SLAM算法可以根据传感器类型被分为三类:纯视觉SLAM、RGB-DSLAM和视觉惯SLAM。纯视觉算法根据追踪的目标不同又被划分为基于特征的(feature-based)和直接(direct)法。其中,前者通过最小化空间重投影误差来优化位姿计算,对弱纹理场景敏感且计算量大;后者通过最小化像素的光度误差来优化位姿,但依赖准确的初始值。
基于RGB-D相机的SLAM系统能直接提供深度图,形成稠密地图,往往被用在三维重建任务上,微软的KineticFusion 算法就是第一个具有实时性的重建算法;近年,用于机器人感知的语义SLAM问题也广泛采用RGB-D相机的深度图作为建图输入,如麻省理工大学的Kimera系统。视觉惯导SLAM,即使用相机和IMU的视觉SLAM方案,一直是视觉定位领域的佼佼者,在广泛的场景下得到应用(如,VR、无人机等)。
视觉惯导SLAM因相机和IMU具有信息互补的特性和低廉的价格而广泛受到关注:相机在低速状态下提供丰富的信息,但对场景尺度估计精度低,在光照变化和运动模糊时鲁棒性降低;IMU对场景变化鲁棒且具有高采样率,但伴有传感器偏置。对于通过传感器融合来提升SLAM系统精度的方案来说,IMU和相机的组合是在体积、重量、耗电和成本达到最优解的6自由度位姿估计器。

图13 视觉惯导SLAM在大疆无人机上的应用
相较于基于激光雷达的SLAM算法,纯视觉算法由于视野、尺度估计等硬件极限问题,目前精度和鲁棒性上尚无法和雷达达到同一水准。但其通过同IMU和主动结构光发射硬件的结合,目前已实现同水准的精度。同激光SLAM一样,视觉也面临当前SLAM领域的未解难题:软硬系统失效的检测和恢复、自动的参数调优、尺度地图的重定位和有限计算和存储资源下的Life-long SLAM。不同的是,视觉SLAM同时也蕴藏着解决这些问题丰富的机遇。图像相较激光具有丰富的纹理信息,通过深度学习能高效习得场景特征,在重定位问题上被广泛研究和验证(如,Patch-NetVLAD)。

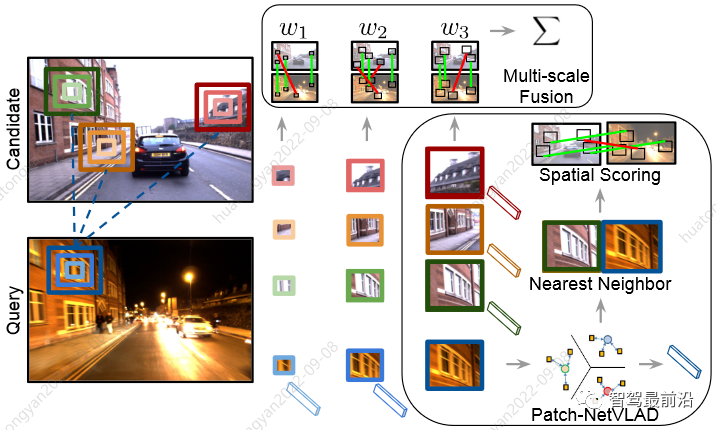
图14 视觉用于解决光照和场景物体变化的重定位问题(Patch-NetVLAD)
而在life-longSLAM问题中,我们需要解决两大问题:如何判断是否更新地图,如何高效存储、表征和更新地图。传统激光雷达的点云地图和视觉的TSDF面元对存储和计算资源要求都极高,而近年发展起来基于视觉的高层级几何理解和物体语义为这些问题提供了新的解决思路。图像丰富的纹理信息使提取表征场景几何特征的点、线、面元素较易提取,这不仅使帧间的特征追踪更加稳定,还引入了鲁棒、紧凑的场景信息表达,使长周期的存储和更新计算变得可行。同时,视觉可以提取场景中物体级别的语义标签,这使得地图的更新标准可解释性和召回率显著提升,让全生命周期的语义地图维护更加精准高效。
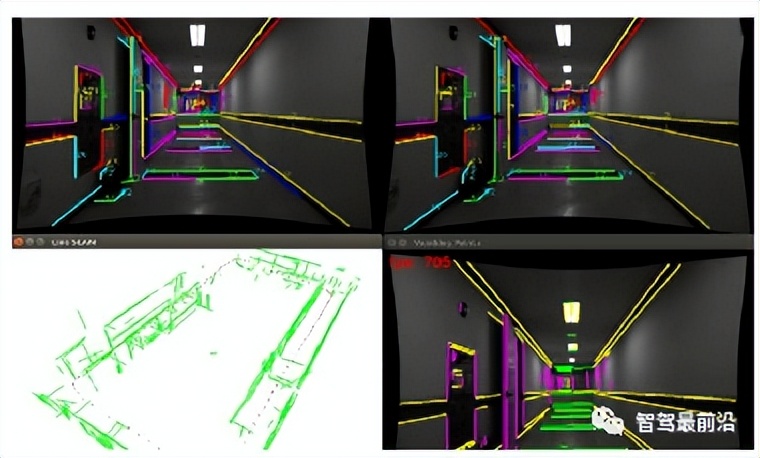
图15 旷视科技的Struct SLAM
转载自深蓝AI,文中观点仅供分享交流,不代表本公众号立场,如涉及版权等问题,请您告知,我们将及时处理。


















