

-
[行业新闻] 捷象灵越与极智嘉达成深度合作,共拓全球托盘......
2026-06-17
-
[行业新闻] 三一机器人无人叉车重磅亮相2026工程机械......
2026-06-17
-
[行业新闻] 上海ProPak开展|翼菲BAT并联机器人......
2026-06-17
-
[行业新闻] 井松智能完成董事会换届,董事长姚志坚兼任总......
2026-05-26
-
[行业新闻] AGV项目怎么评估可行性?5大维度+20个......
2026-05-22
-
[行业新闻] 具身智能人形机器人NAVIAI 亮相Log......
2026-05-09




我们非常荣幸地通知大家:思岚新一代全集成AI空间感知系统——Aurora S正式发布!
为具身智能而生,机器人的专属眼睛
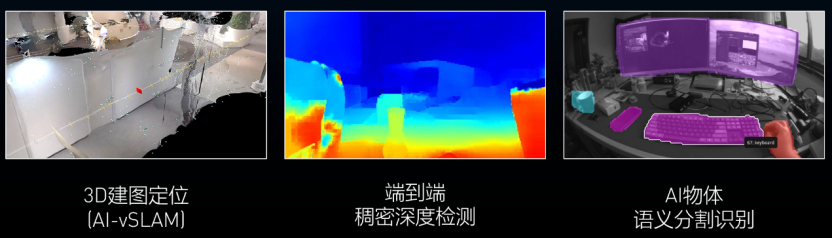
在238克的小巧的机身中,Aurora S首创的将多种空间感知能力:3D实时建图定位(VSLAM)、稠密深度感知以及AI语义识别等功能融合在一起。
并在深度学习引擎的加持下,无需额外开发算法或配备算力,只需要通电,Aurora S即可出色工作,满足具身智能时代下的各类空间感知需求。

简单
多模态空间感知,加速世界模型构建
面对这个由色彩、纹理构成的丰富世界,仅只是把世界简单的抽象成一个只有几何点或者面的单调地图是绝对不够的。作为思岚Aurora家族的新成员,Aurora S在内置了实时高精度视觉建图定位系统基础上,更集成了AI物体识别和语义理解能力。
并且各模块相互高度融合工作,将空间感知能力提升到新的高度,让机器人更好的理解我们的精彩世界!
思岚自研深度学习引擎,从容应对各类挑战
深度学习作为具身智能时代的核心,高维度神经网络的推理效果已在多个领域实现了远超传统方案性能的飞跃。同样我们也将深度学习根植于Aurora S系统内,使得可以从容应对各类环境的严苛挑战。
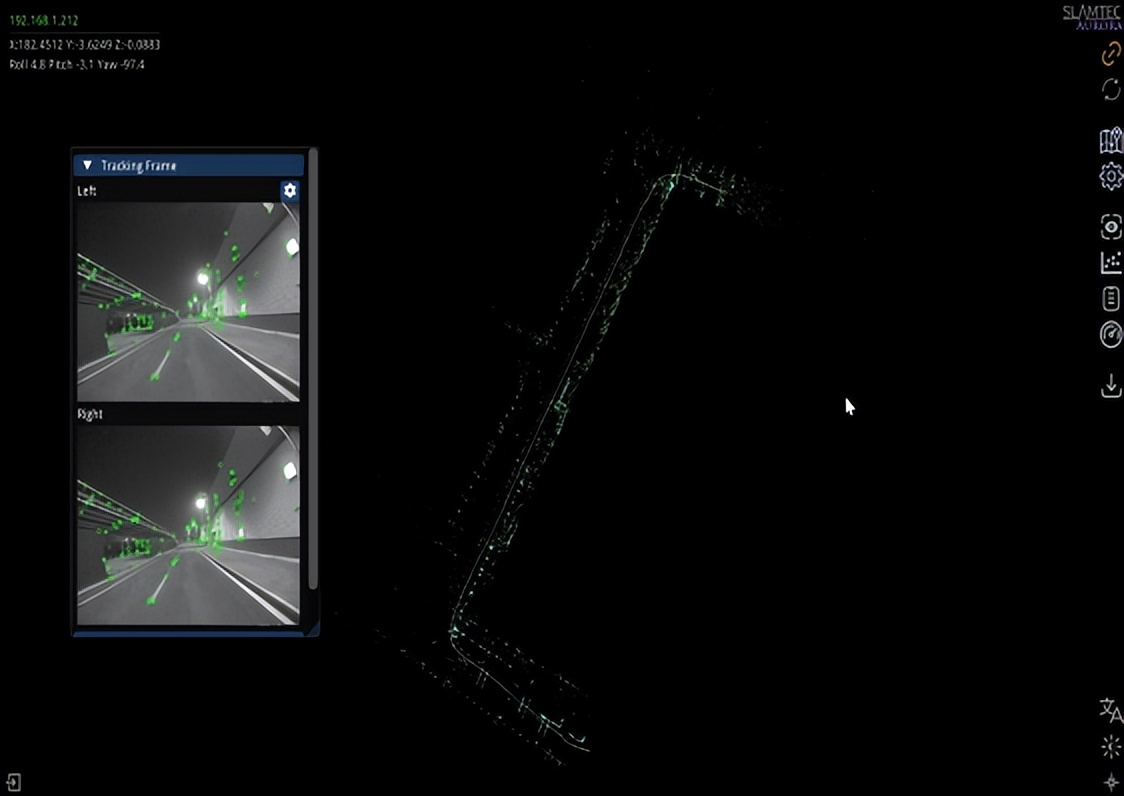
自研深度学习AI-VSLAM,已被多场景验证的高可靠性
高可靠性是一个实时定位和地图(SLAM)系统的必备素质。通过深度学习引擎的加持,Aurora S可以在弱光、高光照变化、弱纹理、高动态环境变化、超大型场景等环境下稳定工作,提供远超传统VSLAM系统的工作表现。
特征点提取-传统方案

特征点提取-aurora的深度学习方案
无论是室内多楼层,户外草地复杂地形还是夜晚弱光环境,Aurora S都能稳定工作。
1500平米空旷草地稳定建图定位
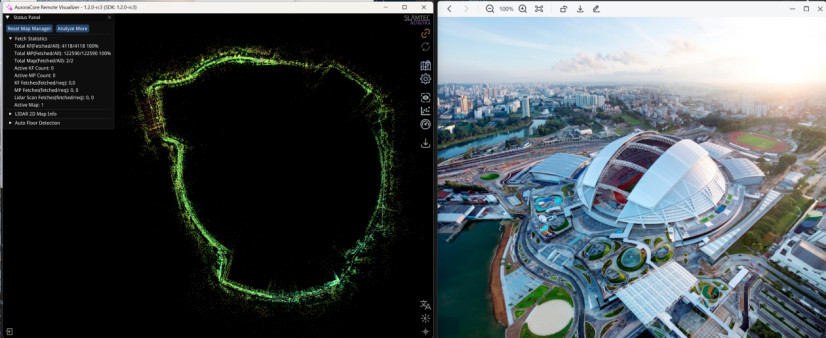
新加坡体育馆75,000平方米室外建图
在户外弱光环境下稳定可靠定位建图
同时,在Aurora S的自身系统内已经内置了全功能的图优化、闭环修正和重定位引擎。性能强劲,不需要再配备外部算法和算力。

Aurora S内置的实时闭环修正和图优化引擎
深度学习的端到端双目深度点云引擎,超大广角,室外可用
Aurora S同样利用深度学习方案实现了深度视觉感知,可以15fps帧率对外输出120°超大广角、高度丰富稠密的深度点云数据。并且无论在室外强光、还是室内弱纹理情况下,都可以稳定工作,效果优于传统双目深度方案。深度数据和RGB色彩严格像素级同步。
AI物体识别和语义分割,识别近百种物体,两套模型动态切换
为了应对不同的语义感知需求,Aurora S内集成了两套物体识别和语义分割模型。可以针对不同场景需求,实时识别超过18类室外场景与80类通用物体,并可按需实时切换。
语义分割和识别的数据也和Aurora S内的其他空间感知系统深度绑定,将各模块数据进行进一步融合,从而实现如语义地图构建等高级功能。

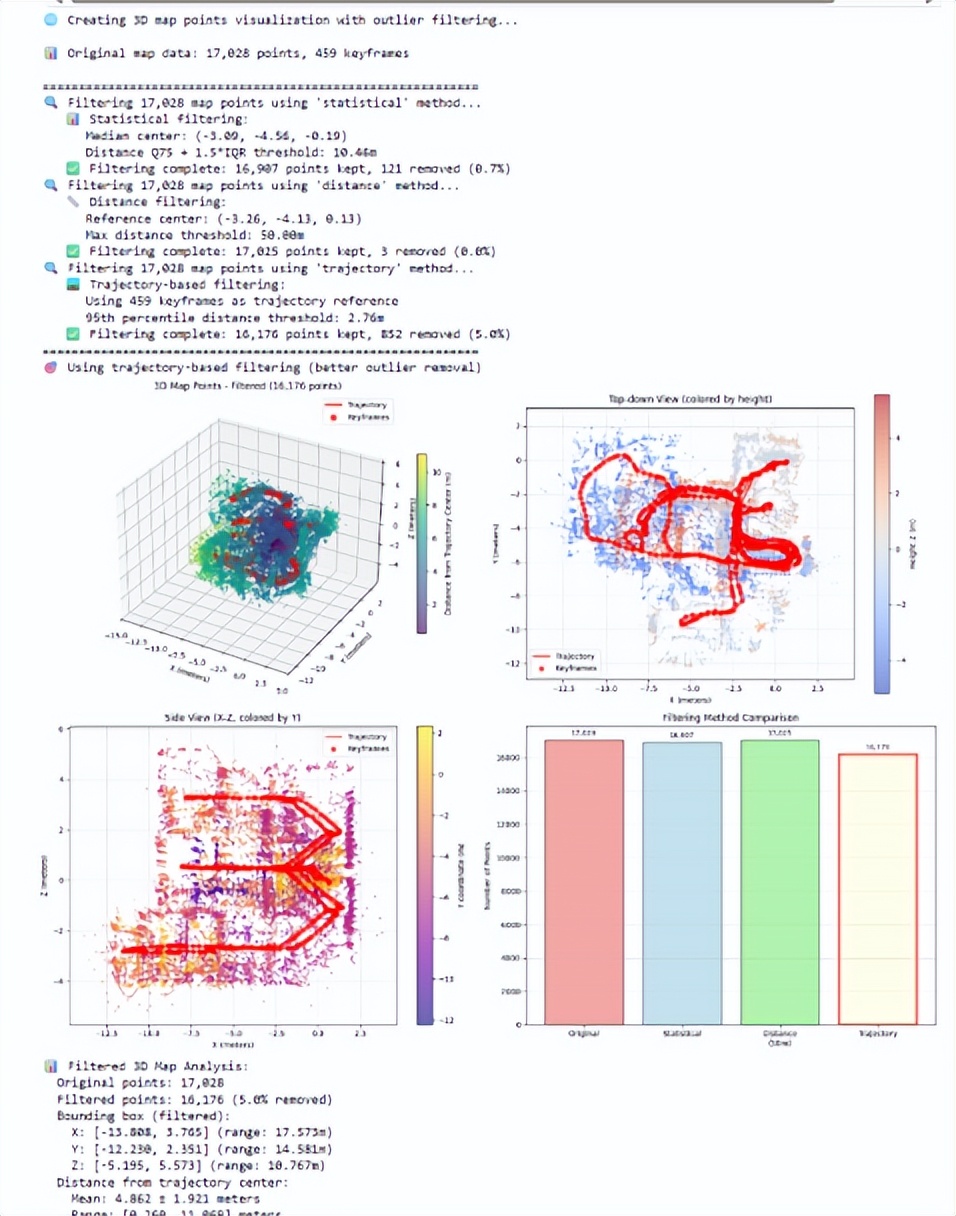
PhotoReal 真景地图:轻松构建数字孪生
传统SLAM系统生成的稀疏、抽象的点云图与我们看到的丰富的世界仍存在很大的差距。Aurora S利用其多模态感知能力,提供了PhotoReal真景地图构建技术。只需要简单操作,便可轻松构建带有真实色彩纹理的稠密3D地图。
相关的建模模型可供进一步的数字孪生、3D场景重建、VLA/VLN训练使用。 助力具身智能构筑“世界模型”!
丰富的扩展开发支持,科研、产品各取所需
Aurora S 配备了完整的开发支持体系来方便广大科研和开发者顺利的基于它展开工作:
Aurora Remote UI可视化工具:无需编码,实时预览3D地图与语义分割效果,轻松管理地图与参数。
Aurora Remote SDK:提供C++、ROS1/ROS2、Python的版本,灵活集成,快速实现稠密建图、语义地图、3D高斯泼溅(3DGS)重建等高阶功能。
同时,为了方便在各自熟悉的环境下使用Aurora S,相关的工具和SDK可以运行在多种平台/架构当中,包括了:
苹果/macOS (M系列芯片)
Windows
Linux (x64和arm64环境)
macOS版本的工具和SDK
Aurora Python SDK提供的开源教程和示例(Jupyter Notebook)
多格式数据集导出
快速接入各类3DGS(高斯泼溅)框架,加速VLA/VLN训练
使用Aurora S的预生成地图和数据,可以一键导出用于进行3DGS以及其他目前行业前沿3D重建框架所支持的输入数据集,例如Colmap格式。实现对于目前SOTA模型和工作成果的评估和进一步研究工作。同时,生成的相关模型文件也可以轻松导入诸如Nvidia omniverse框架,进行VLA/VLN所需的真值数据或者进行sim-to-real训练。

使用Aurora快速实现3DGS场景重建
支持PLY等模型格式导出
赋能千行百业,Aurora S 的应用无处不在
Aurora S的强大性能,正在为多个行业带来智能化升级:
具身智能:为人形机器人、四足机器人提供核心视觉
户外机器人:赋能割草机、农业机器人,应对复杂非结构化环境
工业自动化:提升AGV/AMR在动态车间环境下的智能水平
数字孪生:高效进行3D场景重建,采集VLN/VLA训练数据
低速无人驾驶:服务于园区物流、安防巡检机器人



2026“全国移动机器人行业活动”合作商招募中
报名热线:400-0756-518、13512726426 同微信
活动时间:2025-08-01至08-31
-
 轮胎巨头普利司通全球高管团队到访艾吉威,共探轮胎行业智能物流新未来
轮胎巨头普利司通全球高管团队到访艾吉威,共探轮胎行业智能物流新未来 -
 非夕科技亮相Automate 2026:Enlight、MICO海外发布,多元生态共筑具身智能基座平台
非夕科技亮相Automate 2026:Enlight、MICO海外发布,多元生态共筑具身智能基座平台 -
 喜提锦旗!看劢微机器人如何为精密制造装上“智慧物流”引擎
喜提锦旗!看劢微机器人如何为精密制造装上“智慧物流”引擎 -
 重构空间逻辑,释放系统效率|智库智能CeMAT AUSTRALIA 2026圆满收官
重构空间逻辑,释放系统效率|智库智能CeMAT AUSTRALIA 2026圆满收官 -
 普渡创始人张涛受邀出席2026夏季达沃斯:引领具身智能规模化出海的全球范式
普渡创始人张涛受邀出席2026夏季达沃斯:引领具身智能规模化出海的全球范式 -
 MWC 2026丨乐聚携手产业伙伴共探5G-A具身智能应用新边界
MWC 2026丨乐聚携手产业伙伴共探5G-A具身智能应用新边界 -
 2026亚洲物流双年展制药沙龙 | 捷象灵越助力药企破解合规与效率难题
2026亚洲物流双年展制药沙龙 | 捷象灵越助力药企破解合规与效率难题 -
 梅卡曼德连续四年亮相北美最大自动化展AUTOMATE 2026,展示通用机器人“眼+脑”全新升级突破
梅卡曼德连续四年亮相北美最大自动化展AUTOMATE 2026,展示通用机器人“眼+脑”全新升级突破




Copyright © 2018-2025, 服务热线 400-0756-518
www.zhineng518.com,All rights reserved
版权所有 © 518智能装备在线 未经许可 严禁复制 【冀ICP备19027659号-2】 【公安备13050002001911】
运营商:河北大为信息科技有限公司