在智能移动设备自主运行的赛道上,激光雷达 3D SLAM 技术正成为破局关键,但多数人对其认知仍停留在表层。要读懂这一核心技术,不妨先回溯 “SLAM”的本质 ——SLAM(Simultaneous Localization and Mapping)即时定位与建图,通俗来讲,就是让智能设备在未知环境中同步完成自身位置测算与周边环境地图构建。这两个过程互为支撑,既是机器人自主行动、环境交互的基础,更是自动驾驶与全自主移动设备落地的核心前提。
在智能移动设备自主运行的赛道上,激光雷达 3D SLAM 技术正成为破局关键,但多数人对其认知仍停留在表层。要读懂这一核心技术,不妨先回溯 “SLAM”的本质 ——SLAM(Simultaneous Localization and Mapping)即时定位与建图,通俗来讲,就是让智能设备在未知环境中同步完成自身位置测算与周边环境地图构建。这两个过程互为支撑,既是机器人自主行动、环境交互的基础,更是自动驾驶与全自主移动设备落地的核心前提。
技术路径的差异
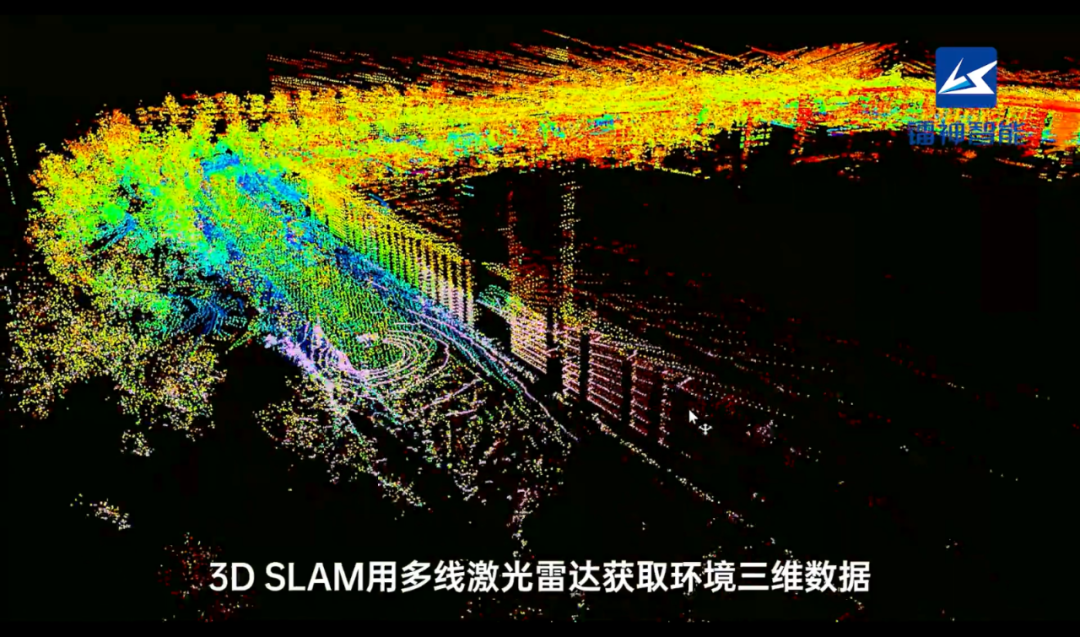
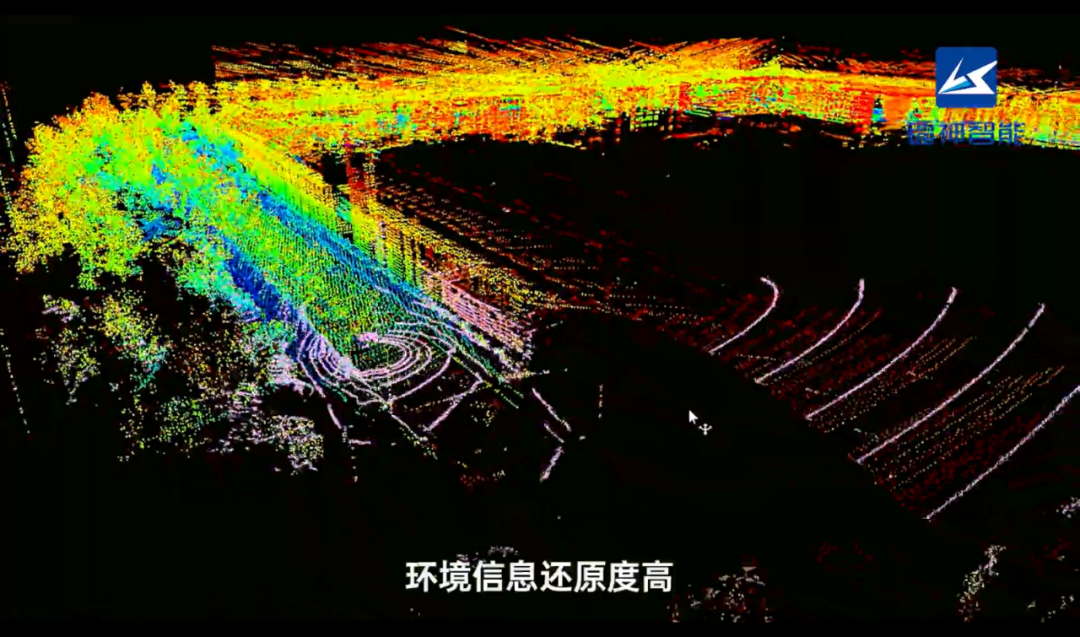
数据采集是 SLAM 技术实现的第一步,而传感器则是数据采集的核心载体。当前行业主流传感器分为激光雷达与摄像头两类,由此形成两大技术分支:依托激光雷达的激光SLAM,以及基于视觉成像的VSLAM。其中激光SLAM进一步按雷达线数细分,单线激光雷达支撑的 2D SLAM 与多线激光雷达驱动的 3D SLAM,构成了激光SLAM的两大技术路径。二者的核心差异在于数据维度:2D SLAM 仅能捕捉平面环境信息,定位局限于二维空间,缺乏高度数据;3D SLAM 则通过多线激光雷达采集三维数据,借助特征点匹配实现精准定位,既能还原物体形状、尺寸,更能高保真复刻环境,信息完整性远超2D技术。

技术成熟度
激光雷达 3D SLAM 的优势早已在行业中凸显。技术成熟度上,激光SLAM早在2005年起便进入深度研究阶段,是目前最稳定的导航方案,而 3D 分支作为升级方向,近年发展迅猛;反观VSLAM,受计算复杂度与光线干扰限制,工程化应用案例寥寥。环境适应性方面,2D SLAM 难以应对动态室内与复杂室外场景,VSLAM 依赖光照、昏暗环境无法工作,而 3D SLAM 实现了室内外全场景覆盖,且不受光线影响,兼具测量精度高、部署便捷等优势。
硬件与算法的深度融合
激光雷达3D SLAM,基于“高精度激光雷达”与“专属算法”的深度融合,二者如同“眼睛”与“大脑”,协同支撑技术功能实现:
(1)硬件核心:自研多线激光雷达
采用镭神智能自研高精度多线激光雷达,通过发射高频激光束扫描周围环境,快速捕捉环境中物体的三维坐标、轮廓形态、尺寸等关键信息,生成高密度点云数据,为环境感知提供 “高质量原始素材”。多线设计确保探测范围更广、数据精度更高,可覆盖叉车作业的全场景感知需求。
(2)算法核心:自研专属融合算法
针对激光雷达的点云数据特性,镭神智能开发定制化处理算法,实现三大核心功能解决场景痛点;
点云数据降噪:过滤强光、粉尘、雨水等干扰信号,剔除冗余数据,提纯有效环境信息
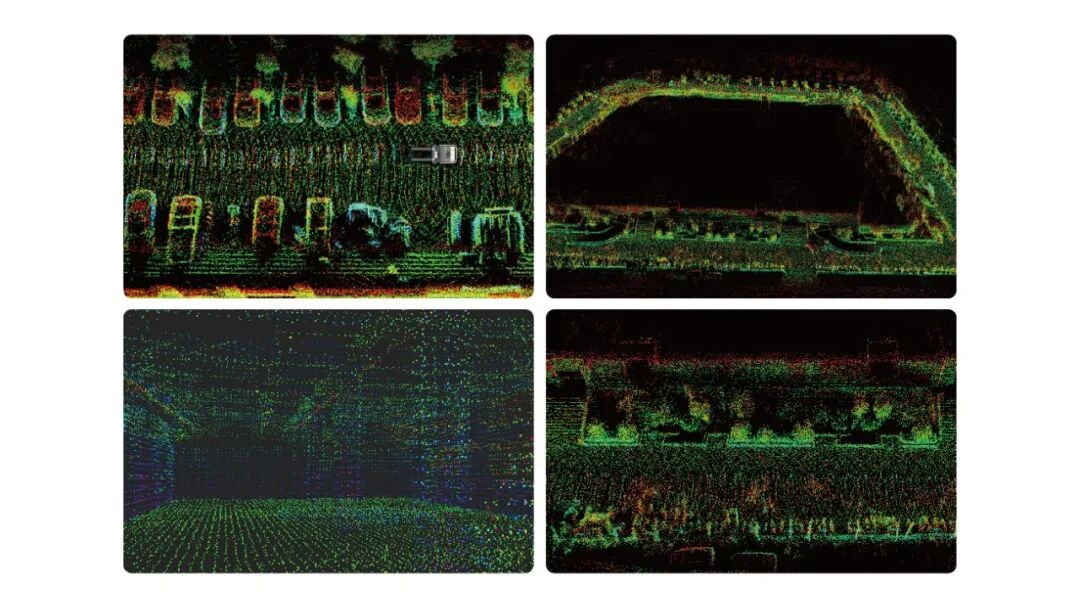
动态目标识别:快速区分静态物体(货架、地面设施)与动态干扰(移动人员、临时堆放货物),避免误判导致的停机

定位与地图的实时校准:通过点云匹配算法,将叉车运动状态(速度、转向角度)与环境数据结合,修正定位误差,确保地图与真实环境始终一致。算法与硬件深度适配,从根源解决复杂环境下 “定位漂移”“地图失真” “信号干扰”等问题,提升技术稳定性,让定位与建图更精准、更高效。
技术落地+产业赋能
随着国产多线激光雷达量产化与性能升级,3D SLAM 技术加速落地。镭神智能深耕行业痛点,历经10年打磨,推出多线激光雷达 3D SLAM 自然导航定位产品,一举破解了反光板、磁条、二维码、2D SLAM 等传统方案的三大难题 —— 场外适用性差、场景局限大、成本高昂、部署繁琐易烂尾。作为全球率先将该技术应用于无人叉车的开拓者,镭神智能凭借技术先发优势,成为行业内 3D SLAM无人叉车技术应用最早、技术最先进、技术最成熟、作业最安全、落地应用项目最多的公司。目前,镭神智能已累计服务 300 余家行业客户,覆盖新能源、汽车电子、物流、食品、纺织等多个领域,其技术方案不仅满足多样化搬运需求,更提供极致安全防护,助力客户实现智能化升级。从技术迭代到产业落地,激光雷达 3D SLAM 已成为全球 SLAM 技术的核心发展趋势,而镭神智能的实践早已超越 “案例” 本身,它让我们看到,真正推动产业变革的,从来不是遥不可及的技术概念,而是像这样扎根痛点、十年磨一剑的坚持;未来,随着智能制造与智慧物流的深化,激光雷达 3D SLAM 必将释放更大能量,而镭神智能写下的生动注脚,也将成为行业前行中最值得借鉴的经验与方向。